-
G.INS MW-AHRSv1
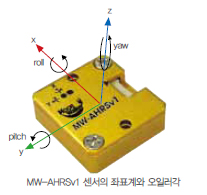
AHRS(Attitude Heading Reference System)는 관성항법장치들 중에서 진행방향(x)과 측면방향(y), 수직방향 (z) 축을 중심으로 회전하는 각도(roll, pitch, yaw)를 측정하는 시스템 입니다.
저희 NTREX에서 출시한 MWAHRSv1 센서는 3축 자이로 센서와 3축 가속도 센서, 3축 자기 센서로부터의 출력 데이터를 칼만필터로 융 합하여 roll과 pitch, yaw 각도를 측정합니다.
칼만필터는 자이로센서에서 측정한 각속도를 적분하여 각도를 추정하고 가속도 센서에서 측정한 중력가속도의 방향으로 roll, pitch 각도를 보정합니다.
또한 자기 센서에서 측정한 지자기의 방향으로 yaw 각도를 보정합니다.
-
특징 및 사양
MW-AHRSv1는 32비트 ARM Cortex-M3 마이크로프로세서를 탑재하고 있으며, 3축 가속도센서와 3축 자 이로센서, 3축 자기센서, 온도센서의 데이터를 사용하여 6개의 위치와 자세정보(x, y, z, roll, pitch, yaw) 중 roll과 pitch, yaw 각을 구하는 AHRS(Attitude Heading Reference System) 모듈 입니다. 이 센서를 사용 하여 로봇 몸체나 핸드의 자세를 쉽게 측정할 수 있습니다.
MW-AHRSv1는 RS-232 통신과 CAN 통신이 지원됩니다. 범용으로 쓰이는 RS-232 통신을 사용하여 사 용자가 측정 데이터를 쉽게 읽어올 수 있고, 장거리 멀티 통신인 CAN(Control Area Network)을 인터페이스 로 사용함으로 메인 컨트롤러 근처에서의 장착을 벗어나 로봇의 중심에 설치되어 정확한 각도를 검출하게 됩니다.
MW-AHRSv1는 센서 특성에 따라 오차가 발생하는 것을 줄이기 위해, 출하 단계에서 모든 캘리브레이션을 마치고 출고합니다.
따라서, 처음 전원 인가 시 별도의 캘리브레이션이 필요 없습니다.
또한 사용자가 편의에 따라 캘리브레이션을 할 수 있도록 software 명령어가 따로 있습니다.
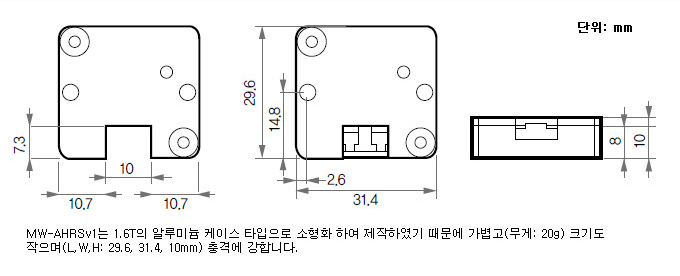
MW-AHRSv1는 두께 1.6mm의 알루미늄 케이스 타입으로 소형화 하여 제작하였기 때문에, 어떠한 충격에 서도 제품을 보호할 것입니다.
ㆍGeneral Specifications- - 두께 1.6mm의 알루미늄 케이스
- - 칼만필터를 이용한 가속도와 자이로 센서 융합
- - 작동 환경 : 각속도 ±2000°/s , 가속도 ±16g, 자기 ±4800μT, 온도 -10~ 80°C
- - 0° 유지 에러 : < 0.2°
- - Dynamic Error : < 2°
- - Resolution : 0.01°
- - Response Time : < 1ms
- - 크기(L,W,H): 29.6mm, 31.4mm, 10mm
- - 무게 : 20g
ㆍElectric Specifications
MW-AHRSv1의 허용전압범위는 4.5~10V 이지만, 내부 레귤레이터의 발열을 감안하여 8V이내를 추천합니다.
또한, 전압을 인가한 후부터, 명령어 수행을 위해 부팅하는 시간은50ms 이내 입니다.데이터의 신뢰 시간의 시작은전원 인가 후 500ms 이후부터입니다.
이는 자이로센서, 가속도센서 등 각종 IC 들의 워밍업 시간 등을 고려한 시간입니다.
Parameter Symbol Max Range Recommend Unit Supply Voltage VDD 4.5 ~ 10 5 ~ 8 V Supply Current IDD 50 mA Power 330 mW Operating Temperature T -10 ~ +80 0 ~ 45 ℃ Gyroscope Range ±2000 º/s Accelerometer Range gFS ±16 g Magnetometer Range ±4800 μT Booting Time 50 ㎳ Initializing Time TB 500 ㎳
ㆍInterfaces- RS-232 Interface:
- - 비트/초: 9600, 19200, 38400, 57600, 115200, 230400, 460800, 921600 bps (Default: 115200)
- - 데이터 비트: 8bits (Fixed)- 패리티: None (Fixed)
- - 정지 비트: 1bit (Fixed)- 흐름제어: None (Fixed)
- CAN (CAN2.0B - Extended CAN) Interface:
- - 비트/초: 1000K, 800K, 500K, 250K, 125K, 50K, 25K, 10K bps (Default: 1000K)
- - Device ID: 0 ~ 255 (Default: 1)
- 가속도, 각속도, 각도, 자기, 온도 데이터 출력
- 최대 1kHz의 동기화 데이터(가속도, 각속도, 각도, 자기) 출력
- RS-232 기반의 모니터링 및 설정 유틸리티(AHRS UI) 제공
ㆍSoftware functions- - RS-232 Baudrate 설정
- - CAN Bit rate 설정
- - 장치 ID 설정
- - 명령어를 통해 0° 캘리브레이션
- - 공장 출하시 초기값 읽기
- - 소프트웨어 리셋
-
기구부
-
구성품
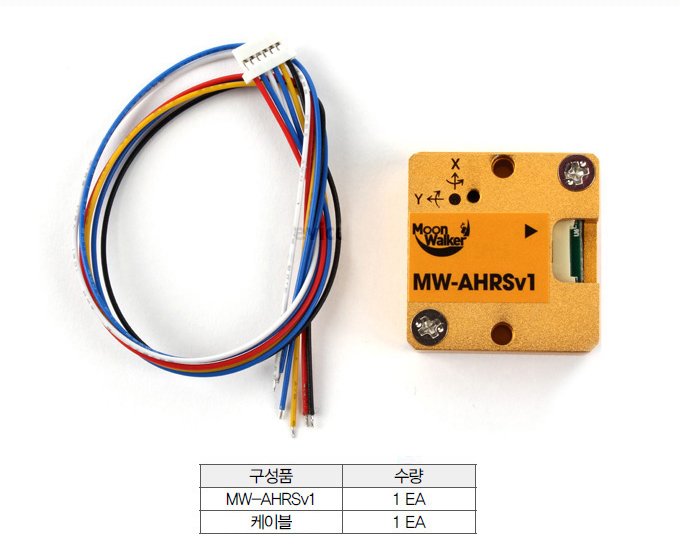
- MW-AHRSv1에 사용된 커넥터와 터미널은 12507HS-06L이며, 터미널은 12507TS 입니다.
-
구매하신 재품에는 MW-AHRSv1 센서의 구동 소프트웨어 나 예제 프로그램, 사용자 메뉴얼이 동봉되어 있지 않습니다.
센서의 구동 및 통신에 필요한 유틸리티 및 예제 코드는 다음 MW-AHRSv1 홈페이지에서 다운로드 가능합니다.
MW-AHRSv1 판매페이지